Yolov5——训练目标检测模型
项目的克隆
打开yolov5官网(GitHub - ultralytics/yolov5 at v5.0),下载yolov5的项目:

环境的安装(免额外安装CUDA和cudnn)
打开anaconda的终端,创建新的名为yolov5的环境(python选择3.8版本):
conda create -n yolov5 python=3.8

执行如下命令,激活这个环境:
conda activate yolov5

打开pytorch的官网,选择自己显卡对应的pytorch版本(我的显卡为GTX1650,这里选择1.8.0pytorch版本):

选择CUDA版本(这里我选择10.2),复制命令到anaconda终端执行:
![]()
至此pytorch环境安装完成,接下来验证CUDA和cudnn版本,打开Ptcharm,执行如下代码:
import torch print(torch.cuda.is_available()) print(torch.backends.cudnn.is_available()) print(torch.cuda_version) print(torch.backends.cudnn.version())
输出如下结果表示安装成功:

利用labelimg标注数据集:
labelimg的安装:
打开cmd命令控制台,输入如下的命令下载labelimg相关的依赖:
pip install labelimg -i https://pypi.tuna.tsinghua.edu.cn/simple
数据准备:
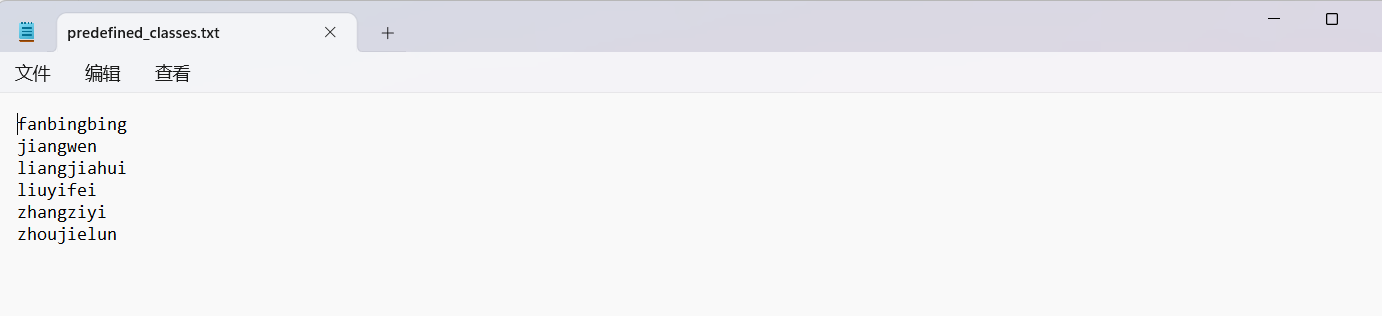
新建一个名为VOC2007的文件夹,在里面创建一个名为JPEGImages的文件夹存放需要打标签的图片文件;再创建一个名为Annotations的文件夹存放标注的标签文件;最后创建一个名为 predefined_classes.txt 的txt文件来存放所要标注的类别名称(这里我的类别一共有6类,分别是fanbingbing,jiangwen,liangjiahui,liuyifei,zhangziyi,zhoujielun):



进入到刚刚创建的VOC2007路径,执行cmd命令:

输入如下的命令打开labelimg并初始化predefined_classes.txt里面定义的类:
labelimg JPEGImages predefined_classes.txt
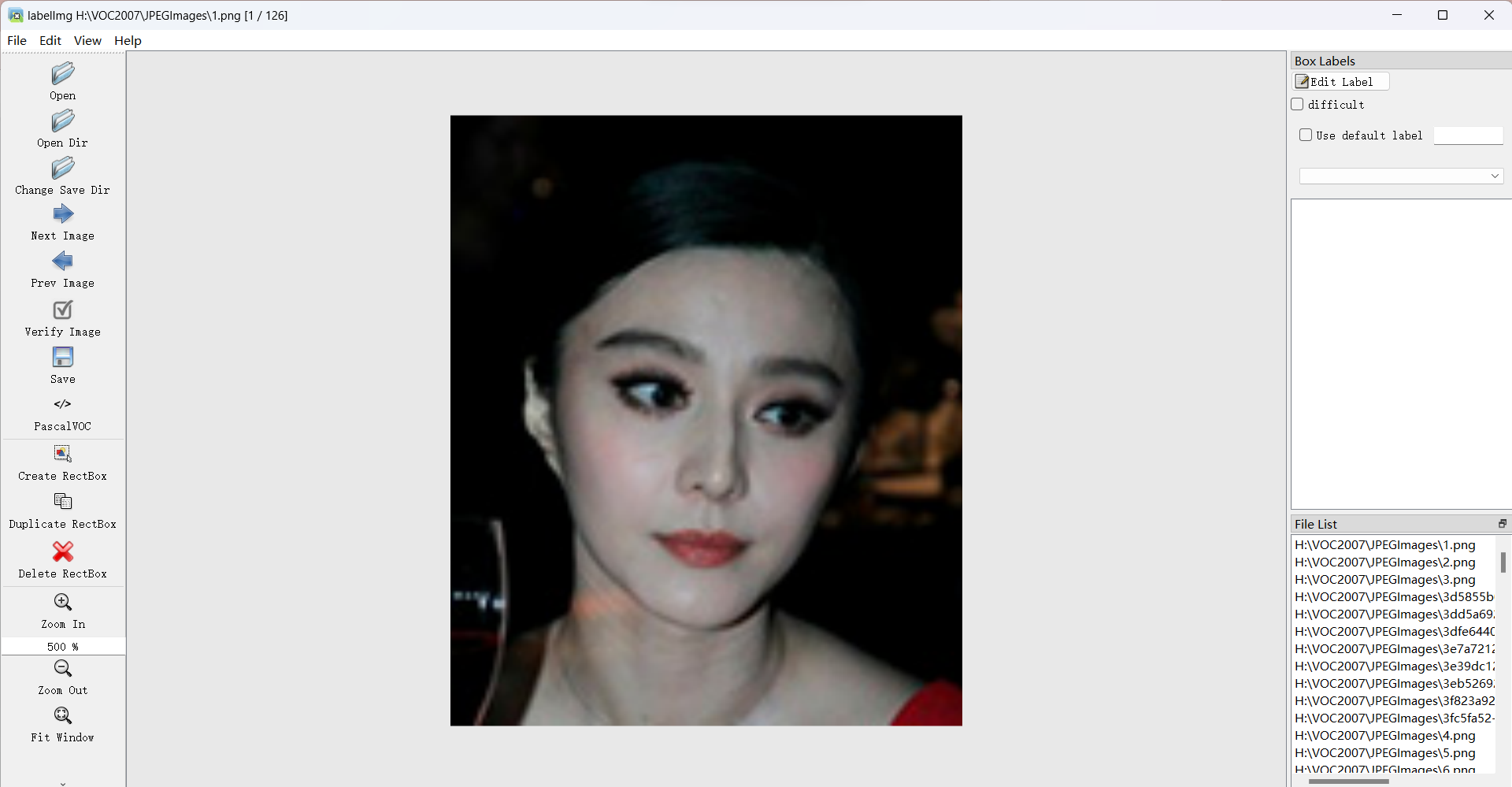
打开view设置,勾选如下选项(建议勾选):

标注数据:
按下快捷键W调出标注十字架,选择需要标注的对象区域,并定义自己要标注的类别:
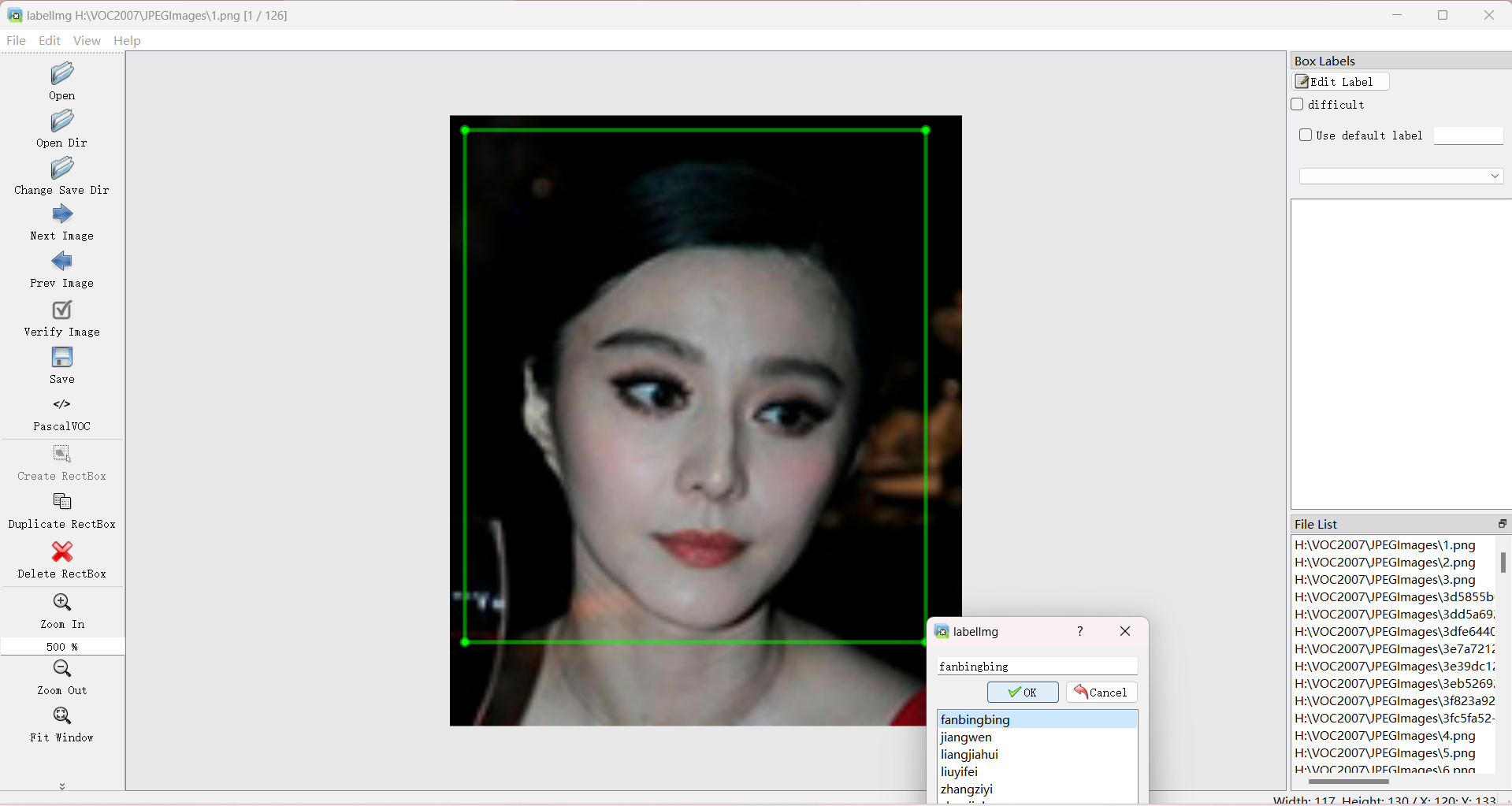
打完标签后的图片会在Annotations 文件夹下生成对应的xml文件:

数据集格式转化及训练集和验证集划分
利用pycharm打开从yolov5官网下载的yolov5项目,在该项目目录下创建名为VOCdevkit的文件夹,并将刚才的VOC2007文件夹放入:

在VOCdevkit的同级目录下创建新的python文件,执行如下代码:
(注:classes里面必须正确填写xml里面已经标注好的类这里为classes = ["fanbingbing", "jiangwen", "liangjiahui", "liuyifei", "zhangziyi", "zhoujielun"])
import xml.etree.ElementTree as ET import pickle import os from os import listdir, getcwd from os.path import join import random from shutil import copyfile classes = ["fanbingbing", "jiangwen", "liangjiahui", "liuyifei", "zhangziyi", "zhoujielun"] # classes=["ball"] TRAIN_RATIO = 80 def clear_hidden_files(path): dir_list = os.listdir(path) for i in dir_list: abspath = os.path.join(os.path.abspath(path), i) if os.path.isfile(abspath): if i.startswith("._"): os.remove(abspath) else: clear_hidden_files(abspath) def convert(size, box): dw = 1. / size[0] dh = 1. / size[1] x = (box[0] + box[1]) / 2.0 y = (box[2] + box[3]) / 2.0 w = box[1] - box[0] h = box[3] - box[2] x = x * dw w = w * dw y = y * dh h = h * dh return (x, y, w, h) def convert_annotation(image_id): in_file = open("F:/Yolov5/yolov5_offical/yolov5-master/VOCdevkit/VOC2007/Annotations/%s.xml" % image_id) out_file = open('F:/Yolov5/yolov5_offical/yolov5-master/VOCdevkit/VOC2007/YOLOLabels/%s.txt' % image_id, 'w') tree = ET.parse(in_file) root = tree.getroot() size = root.find('size') w = int(size.find('width').text) h = int(size.find('height').text) for obj in root.iter('object'): difficult = obj.find('difficult').text cls = obj.find('name').text if cls not in classes or int(difficult) == 1: continue cls_id = classes.index(cls) xmlbox = obj.find('bndbox') b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text)) bb = convert((w, h), b) out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n') in_file.close() out_file.close() wd = os.getcwd() wd = os.getcwd() data_base_dir = os.path.join(wd, "F:/Yolov5/yolov5_offical/yolov5-master/VOCdevkit/") if not os.path.isdir(data_base_dir): os.mkdir(data_base_dir) work_sapce_dir = os.path.join(data_base_dir, "VOC2007/") if not os.path.isdir(work_sapce_dir): os.mkdir(work_sapce_dir) annotation_dir = os.path.join(work_sapce_dir, "Annotations/") if not os.path.isdir(annotation_dir): os.mkdir(annotation_dir) clear_hidden_files(annotation_dir) image_dir = os.path.join(work_sapce_dir, "JPEGImages/") if not os.path.isdir(image_dir): os.mkdir(image_dir) clear_hidden_files(image_dir) yolo_labels_dir = os.path.join(work_sapce_dir, "YOLOLabels/") if not os.path.isdir(yolo_labels_dir): os.mkdir(yolo_labels_dir) clear_hidden_files(yolo_labels_dir) yolov5_images_dir = os.path.join(data_base_dir, "images/") if not os.path.isdir(yolov5_images_dir): os.mkdir(yolov5_images_dir) clear_hidden_files(yolov5_images_dir) yolov5_labels_dir = os.path.join(data_base_dir, "labels/") if not os.path.isdir(yolov5_labels_dir): os.mkdir(yolov5_labels_dir) clear_hidden_files(yolov5_labels_dir) yolov5_images_train_dir = os.path.join(yolov5_images_dir, "train/") if not os.path.isdir(yolov5_images_train_dir): os.mkdir(yolov5_images_train_dir) clear_hidden_files(yolov5_images_train_dir) yolov5_images_test_dir = os.path.join(yolov5_images_dir, "val/") if not os.path.isdir(yolov5_images_test_dir): os.mkdir(yolov5_images_test_dir) clear_hidden_files(yolov5_images_test_dir) yolov5_labels_train_dir = os.path.join(yolov5_labels_dir, "train/") if not os.path.isdir(yolov5_labels_train_dir): os.mkdir(yolov5_labels_train_dir) clear_hidden_files(yolov5_labels_train_dir) yolov5_labels_test_dir = os.path.join(yolov5_labels_dir, "val/") if not os.path.isdir(yolov5_labels_test_dir): os.mkdir(yolov5_labels_test_dir) clear_hidden_files(yolov5_labels_test_dir) train_file = open(os.path.join(wd, "yolov5_train.txt"), 'w') test_file = open(os.path.join(wd, "yolov5_val.txt"), 'w') train_file.close() test_file.close() train_file = open(os.path.join(wd, "yolov5_train.txt"), 'a') test_file = open(os.path.join(wd, "yolov5_val.txt"), 'a') list_imgs = os.listdir(image_dir) # list image files prob = random.randint(1, 100) print("Probability: %d" % prob) for i in range(0, len(list_imgs)): path = os.path.join(image_dir, list_imgs[i]) if os.path.isfile(path): image_path = image_dir + list_imgs[i] voc_path = list_imgs[i] (nameWithoutExtention, extention) = os.path.splitext(os.path.basename(image_path)) (voc_nameWithoutExtention, voc_extention) = os.path.splitext(os.path.basename(voc_path)) annotation_name = nameWithoutExtention + '.xml' annotation_path = os.path.join(annotation_dir, annotation_name) label_name = nameWithoutExtention + '.txt' label_path = os.path.join(yolo_labels_dir, label_name) prob = random.randint(1, 100) print("Probability: %d" % prob) if (prob < TRAIN_RATIO): # train dataset if os.path.exists(annotation_path): train_file.write(image_path + '\n') convert_annotation(nameWithoutExtention) # convert label copyfile(image_path, yolov5_images_train_dir + voc_path) copyfile(label_path, yolov5_labels_train_dir + label_name) else: # test dataset if os.path.exists(annotation_path): test_file.write(image_path + '\n') convert_annotation(nameWithoutExtention) # convert label copyfile(image_path, yolov5_images_test_dir + voc_path) copyfile(label_path, yolov5_labels_test_dir + label_name) train_file.close() test_file.close()
代码执行完成后目录结构如下:

下载预训练权重:
打开这个网址下载预训练权重,这里选择yolov5s.pt。
训练模型
修改数据配置文件:
找到data目录下的voc.yaml文件,将该文件复制一份,重命名为people.yaml:

打开people.yaml,修改相关参数(train,val,nc):

修改模型配置文件:
找到models目录下的yolov5s.yaml文件,将该文件复制一份,重命名为yolov5s_people.yaml:

打开yolov5_people.yaml,修改相关参数(nc):

训练模型:
打开train.py,修改如下参数:
weights:权重的路径
cfg:yolov5s_people.yaml路径
data:people.yaml路径
epochs:训练的轮数
batch-size:每次输入图片数量(根据自己电脑情况修改)
workers:最大工作核心数(根据自己电脑情况修改)
![]()
![]()
![]()
运行train.py函数训练自己的模型。
tensorbord查看参数
打开pycharm的命令控制终端,运行如下命令:
tensorboard --logdir=runs/train


推理测试
模型训练完成后,会在主目录下产生一个名为runs的文件夹,在runs/train/exp/weights目录下会产生两个权重文件,一个是最后一轮的权重文件,一个是最好的权重文件。

打开detect.py文件,修改相关参数:
weights:权重路径(这里选择best.pt)
source:测试数据路径,可以是图片/视频,也可以是'0'(电脑自带摄像头)

行detect.py进行测试,测试结果会保存在runs/detect/exp目录下: