
6R机械臂运动规划及仿真
参考链接
解决Could not find a package configuration file provided by “manipulation_msgs“
moveIt之Unable to identify any set of controllers that can actuate the specified joints问题解决
Unable to identify any set of controllers that can actuate the specified joints: joint1 joint2 ...出错
环境配置
Ubuntu 18.04 melodic
成果图

Part 1: Rviz 机械臂仿真
step1: 下载机械臂模型
下载地址

step2: 创建工作空间
mkdir -p 6R_mechanical_arm/src
cd 6R_mechanical_arm
catkin_make

step3: src文件夹
将之前下载的机械臂模型中 description、gazebo、planning文件夹复制到 src文件夹下

step4: 在 rviz 中显示机械臂模型
在终端中运行 roscore

在工作空间 6R_mechanical_arm 中打开终端
roslaunch marm_description view_arm.launch


step5: 安装 MoveIt
在终端执行以下命令
sudo apt-get install ros-melodic-moveit
step6: 启动 MoveIt
在终端执行以下命令
rosrun moveit_setup_assistant moveit_setup_assistant

step7: 配置 MoveIt
(1)Start





(2)Self-Collisions


(3)Planning Groups(核心)








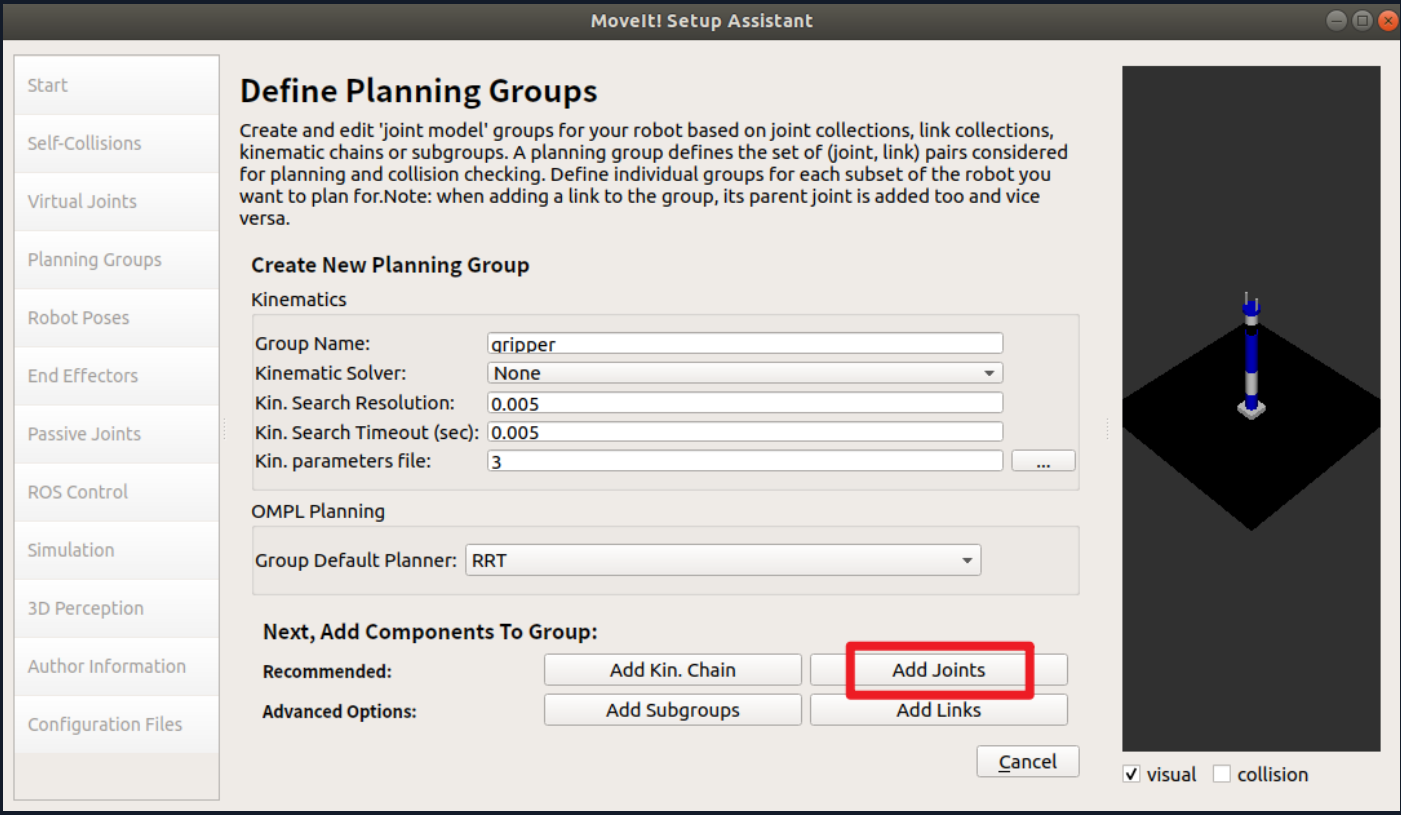



检查是否与下图一致

(4)Robot Poses





(5)End Effectors



(6)Author Information

(7)Configuration Files







step8: 重新编译工作空间


step9: 启动demo文件,测试 rviz 仿真环境


拖动规划
直接鼠标拖动机械臂末端执行器


点击 plan ,进行路径规划


点击 excute ,机械臂运动


设置动画是否循环播放

随机目标点规划


设置初始位姿



添加场景物体



可通过拖动箭头变换位置

Part 2: MoveIt 基础编程
以下代码运行都是在 rviz 打开的前提下执行
关节空间规划
在工作空间中打开终端
source ./devel/setup.bash
rosrun marm_planning moveit_fk_demo.py


工作空间规划
在工作空间中打开终端
source ./devel/setup.bash
rosrun marm_planning moveit_ik_demo.py



笛卡尔路径规划
显示路径



走直线
在工作空间中打开终端
source ./devel/setup.bash
rosrun marm_planning moveit_cartesian_demo.py _cartesian:=True (走直线)



走曲线
在工作空间中打开终端
source ./devel/setup.bash
rosrun marm_planning moveit_cartesian_demo.py _cartesian:=False (走曲线)
*


避障规划
在工作空间中打开终端
source ./devel/setup.bash
rosrun marm_planning moveit_obstacles_demo.py



Part 3: Gazebo 机械臂仿真
step1: 依赖文件配置
(1)关节轨迹控制器
trajectory_control.yaml

arm_trajectory_controller.launch

(2)MoveIt 控制器
在 6R_mechanical_arm/src/marm_moveit_config/config 路径下新建 controllers.yaml 文件

6R_mechanical_arm/src/marm_moveit_config/config/controllers.yaml
controller_manager_ns: controller_manager
controller_list:
- name: arm/arm_joint_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
- name: arm/gripper_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- finger_joint1
- finger_joint2
6R_mechanical_arm/src/marm_moveit_config/launch/arm_moveit_controller_manager.launch.xml

<launch>
<!-- Set the param that trajectory_execution_manager needs to find the controller plugin -->
<arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" />
<param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/>
<!-- load controller_list -->
<!-- Gazebo -->
<rosparam file="$(find marm_moveit_config)/config/controllers.yaml"/>
</launch>
6R_mechanical_arm/src/marm_moveit_config/launch/moveit_planning_execution.launch

<launch>
# The planning and execution components of MoveIt! configured to
# publish the current configuration of the robot (simulated or real)
# and the current state of the world as seen by the planner
<include file="$(find marm_moveit_config)/launch/move_group.launch">
<arg name="publish_monitored_planning_scene" value="true" />
</include>
# The visualization component of MoveIt!
<include file="$(find marm_moveit_config)/launch/moveit_rviz.launch"/>
<!-- We do not have a robot connected, so publish fake joint states -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="/use_gui" value="false"/>
<rosparam param="/source_list">[/arm/joint_states]</rosparam>
</node>
</launch>
(3)启动环境
arm_world.launch

(4)联结所有 launch 文件
arm_bringup_moveit.launch

step2: 启动 gazebo 和 rviz 仿真环境
在工作空间路径下打开终端,输入以下命令
source ./devel/setup.bash
roslaunch marm_gazebo arm_bringup_moveit.launch



调整 rviz 设置



调整 gazebo 设置
存在模型抖动现象,暂时不调整
step3: 使用 MoveIt
调整机器人目标位置
点击 Plan & Execute


问题汇总
1、Could not find a package configuration file provided by “manipulation_msgs“

解决方法
参考地址:解决Could not find a package configuration file provided by “manipulation_msgs“
下载地址:
2、点击 plan&execute 后,rviz有变化,gazebo无变化

解决方案一:
在终端执行以下代码
sudo apt install ros-melodic-ros-controllers
解决方案二:
修改文件:
工作空间/src/marm_moveit_config/launch/trajectory_execution.launch.xml
将参数 pass_all_args="true" 删掉即可
